TCS - Monoviz
TCS - Monoviz
What if affordable cars could see like Teslas—without the price tag? MonoViz explores how a single camera can unlock real-time 3D vision, bringing advanced driver assistance to the masses.
Client
TCS - Tata Consultancy Services
Year
2024
Category
ADAS + ML + Computer Vision
ProjecT Link
Visit Site

VIsion & Problem Statement
VIsion & Problem Statement
Vision:
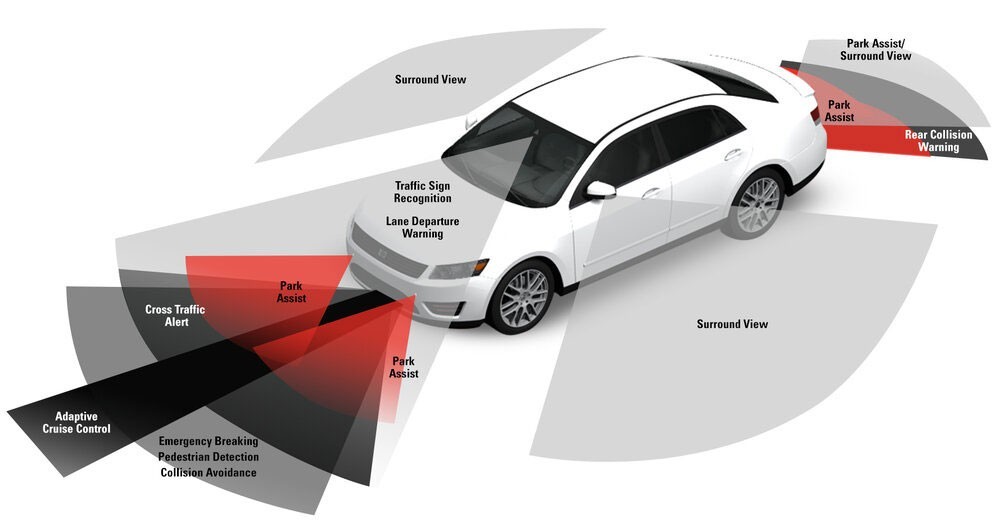
To democratize access to reliable ADAS (Advanced Driver Assistance Systems) by enabling real-time distance estimation using cost-efficient monocular cameras—eliminating reliance on expensive LiDAR/RADAR hardware.
Problem Statement:
LiDAR and RADAR sensors, while accurate, are cost-prohibitive for widespread ADAS adoption. The industry needs a scalable, affordable alternative for Level 3+ autonomy that doesn’t compromise safety.
Vision:
To democratize access to reliable ADAS (Advanced Driver Assistance Systems) by enabling real-time distance estimation using cost-efficient monocular cameras—eliminating reliance on expensive LiDAR/RADAR hardware.
Problem Statement:
LiDAR and RADAR sensors, while accurate, are cost-prohibitive for widespread ADAS adoption. The industry needs a scalable, affordable alternative for Level 3+ autonomy that doesn’t compromise safety.
VIsion & Problem Statement
Vision:
To democratize access to reliable ADAS (Advanced Driver Assistance Systems) by enabling real-time distance estimation using cost-efficient monocular cameras—eliminating reliance on expensive LiDAR/RADAR hardware.
Problem Statement:
LiDAR and RADAR sensors, while accurate, are cost-prohibitive for widespread ADAS adoption. The industry needs a scalable, affordable alternative for Level 3+ autonomy that doesn’t compromise safety.
Product Goal
Product Goal
Develop a lightweight, ML-based vision system that leverages a monocular camera for accurate distance estimation (longitudinal and lateral) between the ego vehicle and nearby objects—enabling affordable ADAS functionality for emerging markets.
Develop a lightweight, ML-based vision system that leverages a monocular camera for accurate distance estimation (longitudinal and lateral) between the ego vehicle and nearby objects—enabling affordable ADAS functionality for emerging markets.
Product Goal
Develop a lightweight, ML-based vision system that leverages a monocular camera for accurate distance estimation (longitudinal and lateral) between the ego vehicle and nearby objects—enabling affordable ADAS functionality for emerging markets.
User Stories
User Stories
Title | As a/an | I want to | So that |
|---|---|---|---|
View Object Distance in Real Time | Driver or test engineer | See accurate object distances displayed on a dashboard | I can make quick, informed decisions in real-time driving conditions |
Evaluate Object Proximity for Research | Researcher validating detection models | Access X and Z coordinates of objects in a structured file | I can compare outputs with ground truth and fine-tune models |
Visualize Traffic from Bird’s Eye View | Visual system designer or ML engineer | See objects rendered in a top-down (BEV) layout | I better understand spatial relationships between vehicles |
Deploy Model on Lightweight Hardware | Embedded systems engineer | Run the model on edge devices like Jetson Nano | I can minimize hardware costs for real-world applications |
Title | As a/an | I want to | So that |
|---|---|---|---|
View Object Distance in Real Time | Driver or test engineer | See accurate object distances displayed on a dashboard | I can make quick, informed decisions in real-time driving conditions |
Evaluate Object Proximity for Research | Researcher validating detection models | Access X and Z coordinates of objects in a structured file | I can compare outputs with ground truth and fine-tune models |
Visualize Traffic from Bird’s Eye View | Visual system designer or ML engineer | See objects rendered in a top-down (BEV) layout | I better understand spatial relationships between vehicles |
Deploy Model on Lightweight Hardware | Embedded systems engineer | Run the model on edge devices like Jetson Nano | I can minimize hardware costs for real-world applications |
User Stories
Title | As a/an | I want to | So that |
|---|---|---|---|
View Object Distance in Real Time | Driver or test engineer | See accurate object distances displayed on a dashboard | I can make quick, informed decisions in real-time driving conditions |
Evaluate Object Proximity for Research | Researcher validating detection models | Access X and Z coordinates of objects in a structured file | I can compare outputs with ground truth and fine-tune models |
Visualize Traffic from Bird’s Eye View | Visual system designer or ML engineer | See objects rendered in a top-down (BEV) layout | I better understand spatial relationships between vehicles |
Deploy Model on Lightweight Hardware | Embedded systems engineer | Run the model on edge devices like Jetson Nano | I can minimize hardware costs for real-world applications |
Core Features
Core Features
Feature | Description | Priority |
|---|---|---|
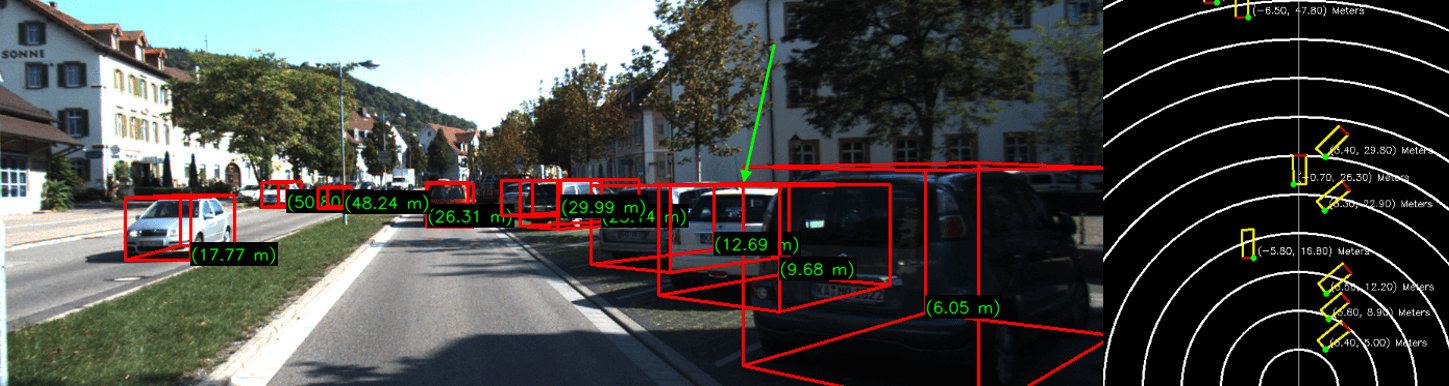
Monocular 3D Object Detection | Uses MonoRCNN + geometric decomposition to estimate real-world distances (X & Z axes) from single images. | P1 |
Bird’s-Eye View Visualization | Projects object locations on a 2D map, aiding spatial awareness for developers and users. | P1 |
Multi-Object Tracking | Simultaneous estimation for vehicles, pedestrians, and cyclists. | P1 |
Real-Time Distance Overlays | Annotates live video feeds with bounding boxes and distance metrics using YOLOv8+Depth estimation. | P2 |
Logging & Evaluation | Generates | P2 |
Feature | Description | Priority |
|---|---|---|
Monocular 3D Object Detection | Uses MonoRCNN + geometric decomposition to estimate real-world distances (X & Z axes) from single images. | P1 |
Bird’s-Eye View Visualization | Projects object locations on a 2D map, aiding spatial awareness for developers and users. | P1 |
Multi-Object Tracking | Simultaneous estimation for vehicles, pedestrians, and cyclists. | P1 |
Real-Time Distance Overlays | Annotates live video feeds with bounding boxes and distance metrics using YOLOv8+Depth estimation. | P2 |
Logging & Evaluation | Generates | P2 |
Core Features
Feature | Description | Priority |
|---|---|---|
Monocular 3D Object Detection | Uses MonoRCNN + geometric decomposition to estimate real-world distances (X & Z axes) from single images. | P1 |
Bird’s-Eye View Visualization | Projects object locations on a 2D map, aiding spatial awareness for developers and users. | P1 |
Multi-Object Tracking | Simultaneous estimation for vehicles, pedestrians, and cyclists. | P1 |
Real-Time Distance Overlays | Annotates live video feeds with bounding boxes and distance metrics using YOLOv8+Depth estimation. | P2 |
Logging & Evaluation | Generates | P2 |
Success Metrics
Success Metrics
Metric | Target |
|---|---|
Short-range MAE | <1.0m |
10% Margin Accuracy | >80% |
Inference Speed | ≥45 FPS |
Hardware Cost Reduction | >$2000/vehicle vs LiDAR |
Metric | Target |
|---|---|
Short-range MAE | <1.0m |
10% Margin Accuracy | >80% |
Inference Speed | ≥45 FPS |
Hardware Cost Reduction | >$2000/vehicle vs LiDAR |
Success Metrics
Metric | Target |
|---|---|
Short-range MAE | <1.0m |
10% Margin Accuracy | >80% |
Inference Speed | ≥45 FPS |
Hardware Cost Reduction | >$2000/vehicle vs LiDAR |
Technical Stack
Technical Stack
Models: MonoRCNN, YOLOv8, Dist-YOLO
Frameworks: PyTorch, OpenCV, Detectron2
Dataset: KITTI Benchmark Suite
Outputs: Annotated visuals, Bird’s Eye View, logs, dist.tx
Models: MonoRCNN, YOLOv8, Dist-YOLO
Frameworks: PyTorch, OpenCV, Detectron2
Dataset: KITTI Benchmark Suite
Outputs: Annotated visuals, Bird’s Eye View, logs, dist.tx
Technical Stack
Models: MonoRCNN, YOLOv8, Dist-YOLO
Frameworks: PyTorch, OpenCV, Detectron2
Dataset: KITTI Benchmark Suite
Outputs: Annotated visuals, Bird’s Eye View, logs, dist.tx
Key Results
Achieved 93.2% accuracy at a 20% error margin across multi-object scenes
Reduced hardware cost by 78% by eliminating the need for LiDAR/RADAR
Enhanced short-range prediction accuracy (≤30m) to under 1m MAE
Delivered within an 8-week sprint despite infrastructure and GPU access constraints
Constraints, Risks, and Mitigations
Issue / Constraint | Type | Mitigation / Notes |
|---|---|---|
No use of stereo or depth cameras | Constraint | Focuses on monocular input for cost-effectiveness; future versions may integrate fusion |
Reduced accuracy in extreme weather (fog, snow, glare) | Risk | Integrate thermal or radar data in future versions to enhance robustness |
Limited generalization beyond KITTI dataset | Risk | Validate on other datasets (nuScenes, CADC); use domain adaptation techniques |
Accuracy decreases for objects >35m away | Constraint | Acknowledge as a current limit of monocular depth estimation; flag distant objects |
Potential slow inference on edge devices | Risk | Model optimization (quantization, pruning) and hardware acceleration |
Business Impact
$2B cost savings potential for automakers at scale
Opened pathways for TCS to collaborate with Tier 1 auto OEMs
Positioned as an R&D differentiator in applied AI for automotive use cases
Future Roadmap
Short-Term
Deploy on edge device (Jetson Nano)
Integrate real-world dashcam input
Mid-Term
Fuse with stereo/thermal/RADAR data
Train on diverse weather datasets (e.g., nuScenes, CADC)
Long-Term
Partner with OEMs for on-road trials
Certify for Level 2–3 ADAS use cases
Key Results
Achieved 93.2% accuracy at a 20% error margin across multi-object scenes
Reduced hardware cost by 78% by eliminating the need for LiDAR/RADAR
Enhanced short-range prediction accuracy (≤30m) to under 1m MAE
Delivered within an 8-week sprint despite infrastructure and GPU access constraints
Constraints, Risks, and Mitigations
Issue / Constraint | Type | Mitigation / Notes |
|---|---|---|
No use of stereo or depth cameras | Constraint | Focuses on monocular input for cost-effectiveness; future versions may integrate fusion |
Reduced accuracy in extreme weather (fog, snow, glare) | Risk | Integrate thermal or radar data in future versions to enhance robustness |
Limited generalization beyond KITTI dataset | Risk | Validate on other datasets (nuScenes, CADC); use domain adaptation techniques |
Accuracy decreases for objects >35m away | Constraint | Acknowledge as a current limit of monocular depth estimation; flag distant objects |
Potential slow inference on edge devices | Risk | Model optimization (quantization, pruning) and hardware acceleration |
Business Impact
$2B cost savings potential for automakers at scale
Opened pathways for TCS to collaborate with Tier 1 auto OEMs
Positioned as an R&D differentiator in applied AI for automotive use cases
Future Roadmap
Short-Term
Deploy on edge device (Jetson Nano)
Integrate real-world dashcam input
Mid-Term
Fuse with stereo/thermal/RADAR data
Train on diverse weather datasets (e.g., nuScenes, CADC)
Long-Term
Partner with OEMs for on-road trials
Certify for Level 2–3 ADAS use cases
Key Results
Achieved 93.2% accuracy at a 20% error margin across multi-object scenes
Reduced hardware cost by 78% by eliminating the need for LiDAR/RADAR
Enhanced short-range prediction accuracy (≤30m) to under 1m MAE
Delivered within an 8-week sprint despite infrastructure and GPU access constraints
Constraints, Risks, and Mitigations
Issue / Constraint | Type | Mitigation / Notes |
|---|---|---|
No use of stereo or depth cameras | Constraint | Focuses on monocular input for cost-effectiveness; future versions may integrate fusion |
Reduced accuracy in extreme weather (fog, snow, glare) | Risk | Integrate thermal or radar data in future versions to enhance robustness |
Limited generalization beyond KITTI dataset | Risk | Validate on other datasets (nuScenes, CADC); use domain adaptation techniques |
Accuracy decreases for objects >35m away | Constraint | Acknowledge as a current limit of monocular depth estimation; flag distant objects |
Potential slow inference on edge devices | Risk | Model optimization (quantization, pruning) and hardware acceleration |
Business Impact
$2B cost savings potential for automakers at scale
Opened pathways for TCS to collaborate with Tier 1 auto OEMs
Positioned as an R&D differentiator in applied AI for automotive use cases
Future Roadmap
Short-Term
Deploy on edge device (Jetson Nano)
Integrate real-world dashcam input
Mid-Term
Fuse with stereo/thermal/RADAR data
Train on diverse weather datasets (e.g., nuScenes, CADC)
Long-Term
Partner with OEMs for on-road trials
Certify for Level 2–3 ADAS use cases
More Works More Works
More Works More Works
CMU - A DIstributed App
APP DEV + REST APIS + CLOUD ANALYTICS
2024
2024
CMU - A DIstributed App
APP DEV + REST APIS + CLOUD ANALYTICS
2024
2024
CMU - A DIstributed App
APP DEV + REST APIS + CLOUD ANALYTICS
2024
2024
CMU - A DIstributed App
APP DEV + REST APIS + CLOUD ANALYTICS
2024
2024
CMU - AI FORGE
STRATEGY + GAME DEV + AI NPCS
2024
2024
CMU - AI FORGE
STRATEGY + GAME DEV + AI NPCS
2024
2024
CMU - AI FORGE
STRATEGY + GAME DEV + AI NPCS
2024
2024
CMU - AI FORGE
STRATEGY + GAME DEV + AI NPCS
2024
2024